




•Noticia

Compartir




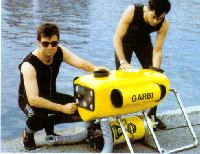
Garbí, un minirobot submarino único en todo el Estado
Un grupo de científicos del Departamento de Ingeniería de Sistemas, Automática e Informática Industrial ha desarrollado y construido un minirobot submarino, denominado ‘Garbí’, para llevar a cabo investigación marina. El robot, que actualmente está en fase de experimentación, es el primero de este tipo en todo el Estado español.
30/05/1998
El minisubmarino diseñado por el grupo de investigadores de la UPC, encabezado por el catedrático Josep Amat, forma parte de la familia de los denominados Remote Operate Vehicle (ROV) y ja sido concebido
inicialmente para realizar observaciones de la flora y fauna subacuáticas, más concretamente de control y recogida de mestras de Caulerpa Taxifolia en el litoral catalán. Para incrementar la autonomía y operatividad del vehículo, se ha dotado al Garbí de un sistema de visión que facilita las tareas de control remoto de movimientos. El sistema puede estabilizarse de forma dinámica ante un objeto o una zona de interés. En este sentido, el sistema de navegación, que se realiza mediante cinco propulsores, dispone de instrumentos de control que permiten los desplazamientos hacia los puntos de destino de forma autónoma.
El vehículo, que puede trabajar a una profundidad de hasta 200 metros, puede realizar tareas de explotación, reconocimiento y manipulación subacuática. El sistema de visión del vehículo está integrado por tres cámaras. Una de ellas dispone de autofocus y zoom por telecontrol, y es la que se utiliza para la obtención de las imágenes principales de la escena. Las otras dos cámaras tienen la óptica fija y sirven para obtener imágenes estereoscópicas. Para controlar la navegación se ha desarrollado un módulo de control de trayectoria mediante el cual el sistema selecciona las coordenadas de destino y permite que el Garbí navegue de forma automática hasta el área de trabajo.
Múltiples aplicaciones
Los científicos han desarrollado un hardware que, mediante las imágenes en 3D que ofrecen las cámaras fijas, permite la estabilización dinámica de la cápsula. Esta característica hace que el Garbí sean un aherramienta útil para realizar tareas de mantenimiento de puertos, canales y presas, así como de detección de fisuras en barcos. También tiene aplicaciones en la investigación arqueológica. El Garbí dispone de dos brazos con los que se pueden relaizar tareas de manipulacióin por telecontrol, como la recogida de muestrtas. El usuario controla los movimientos de los brazos mediante una silla de dos brazos.
1998-05-30
El vehículo, que puede trabajar a una profundidad de hasta 200 metros, puede realizar tareas de explotación, reconocimiento y manipulación subacuática. El sistema de visión del vehículo está integrado por tres cámaras. Una de ellas dispone de autofocus y zoom por telecontrol, y es la que se utiliza para la obtención de las imágenes principales de la escena. Las otras dos cámaras tienen la óptica fija y sirven para obtener imágenes estereoscópicas. Para controlar la navegación se ha desarrollado un módulo de control de trayectoria mediante el cual el sistema selecciona las coordenadas de destino y permite que el Garbí navegue de forma automática hasta el área de trabajo.
Múltiples aplicaciones
Los científicos han desarrollado un hardware que, mediante las imágenes en 3D que ofrecen las cámaras fijas, permite la estabilización dinámica de la cápsula. Esta característica hace que el Garbí sean un aherramienta útil para realizar tareas de mantenimiento de puertos, canales y presas, así como de detección de fisuras en barcos. También tiene aplicaciones en la investigación arqueológica. El Garbí dispone de dos brazos con los que se pueden relaizar tareas de manipulacióin por telecontrol, como la recogida de muestrtas. El usuario controla los movimientos de los brazos mediante una silla de dos brazos.
1998-05-30
Síguenos en Twitter







